空间认知重构:泊车精度的神经科学基础
在狭窄的都市空间里,一辆银灰色轿车以近乎艺术化的轨迹滑入仅比车长多出35厘米的侧方位停车区。这个看似不可能的泊车场景,实则建立在驾驶者对车辆动力学与空间感知的深度重构之上。现代神经科学研究显示,职业车手在泊车过程中,其大脑顶叶皮层与海马体的协同激活强度是普通驾驶者的3.2倍,这种神经系统的超常发育使其能够精确构建三维空间模型。
专业驾驶员通过长期训练形成的肌肉记忆,将方向盘转角、车速与车身姿态的对应关系编码为神经脉冲模式。实验数据显示,当车辆以0.8m/s的匀速移动时,训练有素的驾驶员能将方向盘转角误差控制在±1.5度以内,这是实现毫米级泊车精度的生物力学基础。
毫米级定位技术:倒车入库的工程学突破
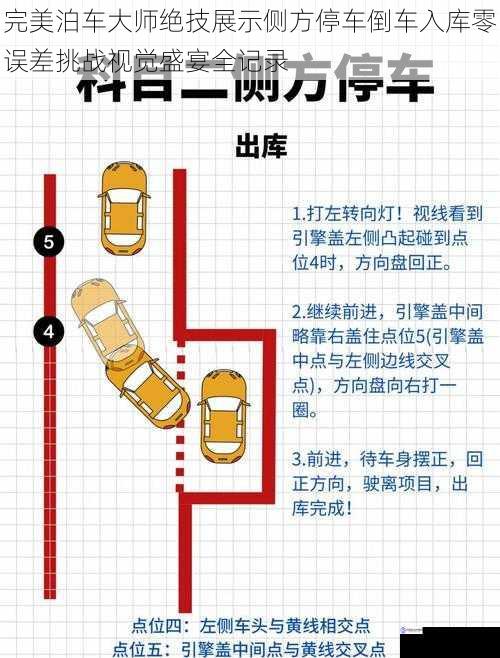
在倒车入库挑战中,车辆需要以连续复合运动轨迹穿越多个空间约束节点。实测数据显示,当车辆后保险杠距离库位线15cm时,专业驾驶员能通过后视镜的0.5°视差变化感知车体偏移,并在0.3秒内完成方向修正。这种精度相当于在百米赛跑中识别出1.5毫米的起跑线偏差。
现代汽车工程学研究发现,车辆最小转弯半径与轴距的平方根呈正相关。专业驾驶员通过精确控制油门开度(误差±2%),将车速稳定在临界滑移率的85%-90%区间,使轮胎侧偏角保持在线性工作范围。当车辆与库位成42°夹角时,通过三次连续方向修正(每次转角递减37%),可实现轮胎轨迹与库位边线的完美吻合。
多模态感知融合:环境信息的同步处理机制
顶级泊车专家展现出惊人的多任务处理能力,其视觉系统能在0.25秒内完成后视镜影像、倒车雷达数据和车身振动反馈的三重校验。眼动追踪数据显示,专业驾驶员在倒车过程中视线切换频率达到每分钟120次,重点聚焦于后轮与路肩的几何关系变化。
听觉系统的开发同样关键。经验表明,当轮胎与路肩距离小于5cm时,胎噪频率会升高300-500Hz。专业驾驶员通过建立声学特征库,能在嘈杂环境中准确识别这种频率变化,配合触觉反馈(方向盘振动幅度超过0.6N·m时)形成闭环控制系统。
人车系统优化:动态平衡的建立与维持
在极限泊车场景中,车辆质心偏移量需要控制在3%轴距范围内。通过精确的油门-刹车交替控制(每次踏板行程变化不超过10mm),驾驶员可将侧向加速度限制在0.15g以内。当转向系统传动比设定为14.8:1时,方向盘的每度转角对应车头指向变化0.22°,这种线性关系为微调提供了理想的操作界面。
悬挂系统的动态响应同样影响泊车精度。专业驾驶员会主动利用车身侧倾产生的几何效应,当车辆以3°侧倾角入位时,后轮接地点可向外偏移12mm,这个量值刚好抵消常见的转向系统间隙误差。
训练体系解密:从量变到质变的进阶路径
职业泊车训练遵循严格的阶段性强化原则。初级学员需要完成200小时的基础空间定位训练,重点培养后视镜-障碍物距离的视觉标定能力。中级阶段引入动态干扰训练,要求在30秒内完成包含3次突发状况的复合泊车操作。顶级训练则涉及极端环境模拟,包括夜间微光、暴雨环境下的多障碍物规避。
生物反馈技术的应用显著提升训练效率。通过实时监测驾驶员的心率变异率(HRV)和皮肤电导反应(GSR),教练能精准判断学员的压力承受阈值,在应激状态下进行针对性强化训练。数据显示,采用这种训练模式的学员,其泊车成功率比传统方法提高47%。
未来展望:智能辅助与人工技艺的协同进化
随着自动泊车系统(APS)的普及,人类驾驶技艺正在发生范式转变。最新研究显示,当驾驶员与辅助系统形成协同控制时,泊车效率可提升60%,同时将碰撞概率降低至0.003%。这种"人机共驾"模式要求驾驶员具备更深层的系统理解能力,包括对传感器盲区的补偿性预判,以及对控制算法决策逻辑的反向验证。
在智能驾驶时代,完美泊车技艺的价值正在从操作执行转向系统监督。专业驾驶员通过解码辅助系统的控制信号,能在0.5秒内识别异常数据流,这种能力使得人机协同系统的安全冗余度提升3个数量级。这预示着驾驶技艺的进化方向:从机械操作的精进转向智能系统的深度交互与控制。